当前位置:首页>>广州有道有限元>>ANSYS有限元分析
4 应用接触向导创建接触对
所有面-面接触的单元选项和参数都可以通过接触向导来控制。使用接触向导进行接触分析方便快捷 :
自动定义单元类型和实常数
快速得到接触选项和参数
快速显示和反转接触法向
使用接触向导必须首先对基体进行网格划分,否则不能激活接触向导。
下面仍以弹性环装配接触问题为例。采用接触向导完成接触对的创建来说明接触向导的使用方法。
Step 1. 恢复数据文件
Utility Menu > File > Resume from…
选 Snap.db
【OK】(图4-1)
此数据库 Snap.db 包括此有限元模型的几何、基体
单元、分网、材料和边界条件。但不包括接触单元与目标单元及接触有关的参数。

Step 2.启动接触向导
Main Menu > Preprocessor > Modeling > Create > Contact Pair
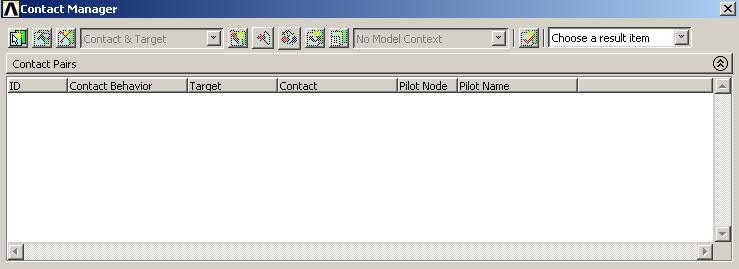
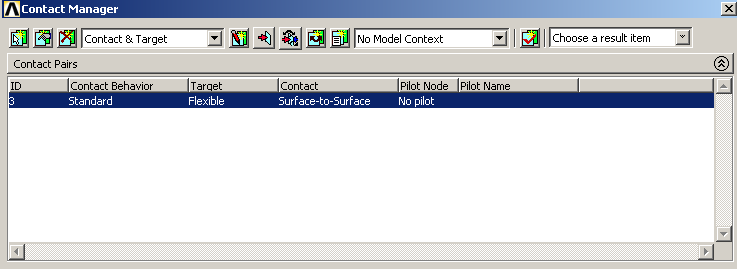
3. 创建接触对
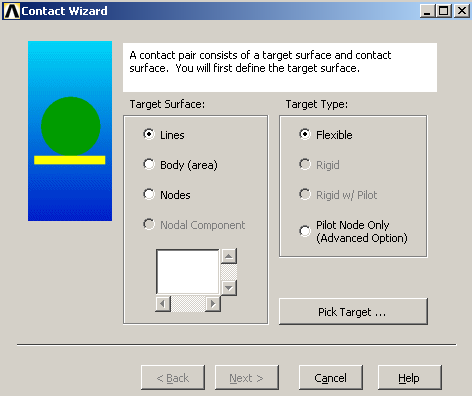
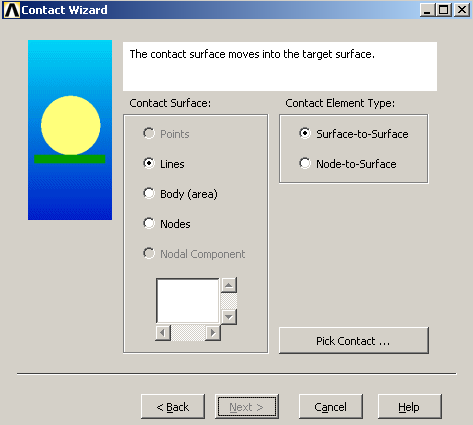
图4-3 图4-4
【Pick Target】(图4-3),拾取线(见图3-5) 【OK】,再定义接触面 返回图4-4 【Next】 (图4-5)
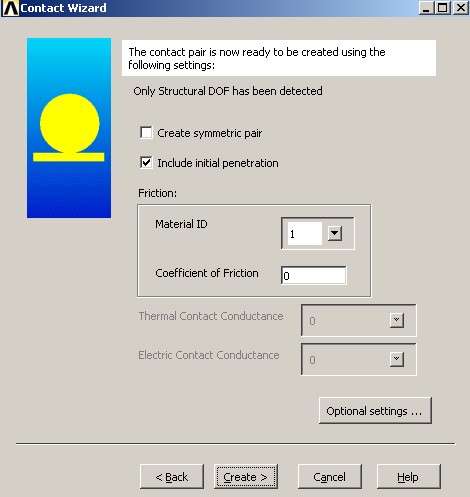
图4-5
【opening setting】图4-6
4. 设置接触参数 【OK】 返回图4-5【create】
【Finish】返回图4-2
退出
Step 5.求解
求解过程同前
实例 2 平面密封圈计算
验证为接触刚度估计一个合适的初始值的重要性
验证接触分析中摩擦的应用 - 弹性库仑摩擦
验证基于接触单元临界状态变化的时间步预测如何会对计算效率有害
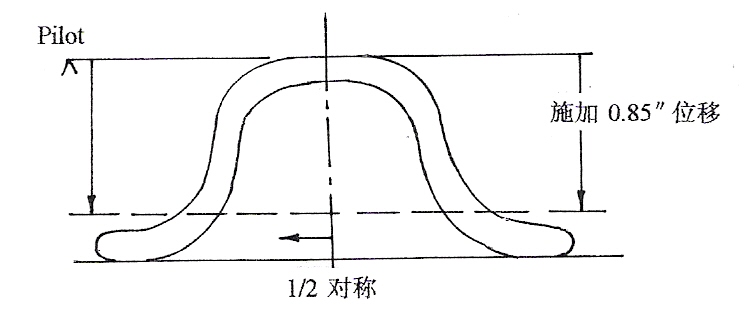
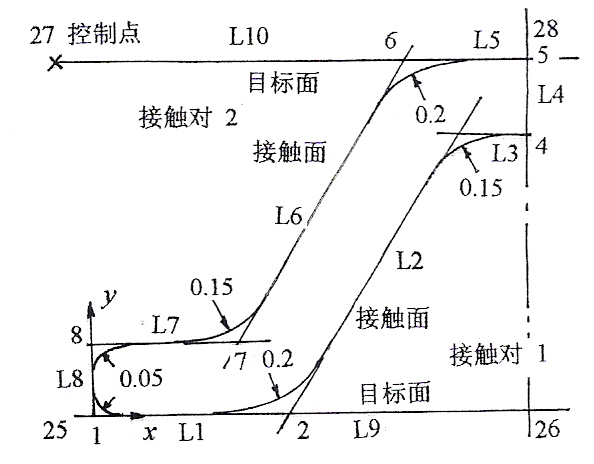
模型描述:2D 超弹平面密封圈
½ 对称,密封圈压缩模拟
分析此模型采用两种方法:
1. 不使用接触向导,建立命流文件 Seal.inp
2. 使用接触向导创建接触对,并用 GUI 方式创建 Pilot 节点。
本例具有:
几何 N.L(大应变与大变形)
材料 N.L(超弹)
接触 N.L
数据文件: Seal.inp
1. 建模:单元类型、实常数、 材料特性、基体分网
/prep7
et,1,56 ! HYPER56 2D 4node U_P Hyperelastic Solid
mp,nuxy,0.49
tb,mooney,1
tbdata,1,80 ! C10 = 80
tbdata,2,20 ! C01 = 20
k,1 $k,2,0.333,0 $k,3,0.867,0.867
k,4,1.1,0.867
k,5,1.1,1 $k,6,0.8,1 $k,7,0.267,0.133
k,8,0,0.133
l,1,2
*repeat,7,1,1 ! 将l,1,2命令重复7次
l,8,1
lfil,1,2,0.20 $lfil,2,3,0.15 $lfil,5,6,0.20
lfil,6,7,0.15 $lfil,7,8,0.05 $lfil,8,1,0.05
al,all ! 应用所有选择的线生成面
k,25,-0.6,0 $k,26,1.1,0 $k,27,-0.6,1.0
k,28,1.1,1.0
lstr,26,25 ! L9
lstr,27,28 ! L10
! *** 基体分网 ***
lesize,8,,,2 $lesize,13,,,4 $lesize,14,,,4
esize,0.035
type,1
mat,1
amesh,all
save,seal,db
Step 2. 创建接触对,先定义单元和接触参数
et,2,169 ! Target169 2D Target Segment
et,3,171 ! Conta171 2D Surface to Surface Contact
mp,mu,1,0 ! 用材料特性定义摩擦,本例先无摩擦计算然后再有摩擦计算,比较结果
r,1,,,0.1,0.1 ! 用实常数定义接触高级选项对于弯曲为主的问题,采用接触刚度FKN = 0.1作为初始估计值, FTOLN = 0.1 lagrange穿透比例系数(缺省值)
r,2,,,0.1,0.1 ! 如果FKN = 1.0则不收敛
! *** 创建接触对1(定义实常数和分网) ***
type,2 ! 目标面 1 Target169
real,1 ! Target169的实常数
mat,1 ! 接触面 1 定义材料与超弹单元同
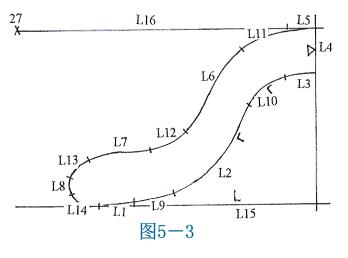
lesize,15,,,1 ! 目标面1(L15)分网尺寸(图5-3)
lmesh,15 ! 目标面1(L15)分网,采用自动分网,此刚性面自动约束。检查外法线方向
【OK】
! *** 接触面1:实常数(与目标面1一致)、分网
lsel,s,line,,1,3,1 ! 选L1,L2,L3
lsel,a,line,,9,10,1 ! 再加L9,L10
lsel,a,line,,14 ! 再加L14
nsll,s,1 ! 选择和所选线相连系的节点
type,3 ! Conta171这里未发布Real,1,实常数未重新定义就是前面的Real,1,MAT也是前面的MAT, 1
esurf ! 生成接触单元
lsel,all
! *** 检查外法线方向【OK】 ***
! *** 创建接触对2 ***
! *** 创建接触对2 ***
type,2 ! 目标面2 Target169
real,2 ! MAT未重新定义,就是前面的MAT, 1
lesize,16,,,1 ! 目标面2
lmesh,16 ! L16分网(目标2分网)
kmesh,27 ! 指定Pilot点
! *** 检查外法线方向【OK】 ***
type,3 ! 接触面2 Conta171 Real,2; Mat,1
lsel,s,line,,5,7, 1 ! 选L5, L6, L7
lsel,a,line,,11,13,1 ! 再加L11,L12,L13
nsll,s,1
esurf ! 生成接触单元,其Real,2; Mat,1
lsel,all
nsel,all
! *** 检查外法线方向【OK】 ***
3. 施加边界条件
! 刚性面1 被约束
! 刚性面2 随Pilot点移动
! L4对称约束
dl,4,,ux,0
n_load=node(kx(27),ky(27),0) ! 为定义刚性面2的位移做准备
finish
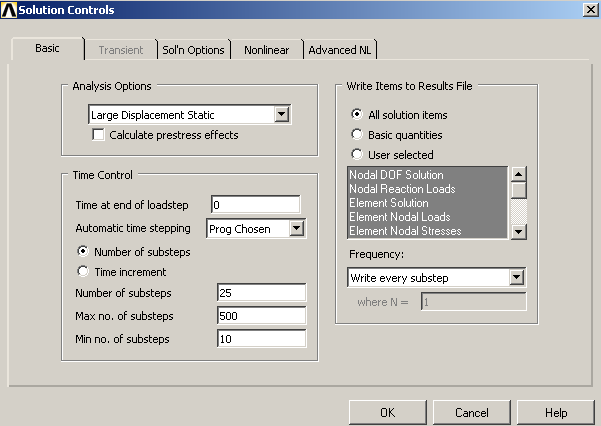
4.定义求解选项和载荷步
/solu
nlgeom,on
solc,on ! N.L求解自动控制打开(缺省)
time,0.85 ! 载荷步、结束时间
d,n_load,uy,-0.85
nsubst,25,500,10
outres,all,all
monitor,var3,n_load,fy
Step 5.求解
Solve
Step 6.查看结果
/post1
pldsp,2 ! 变形图
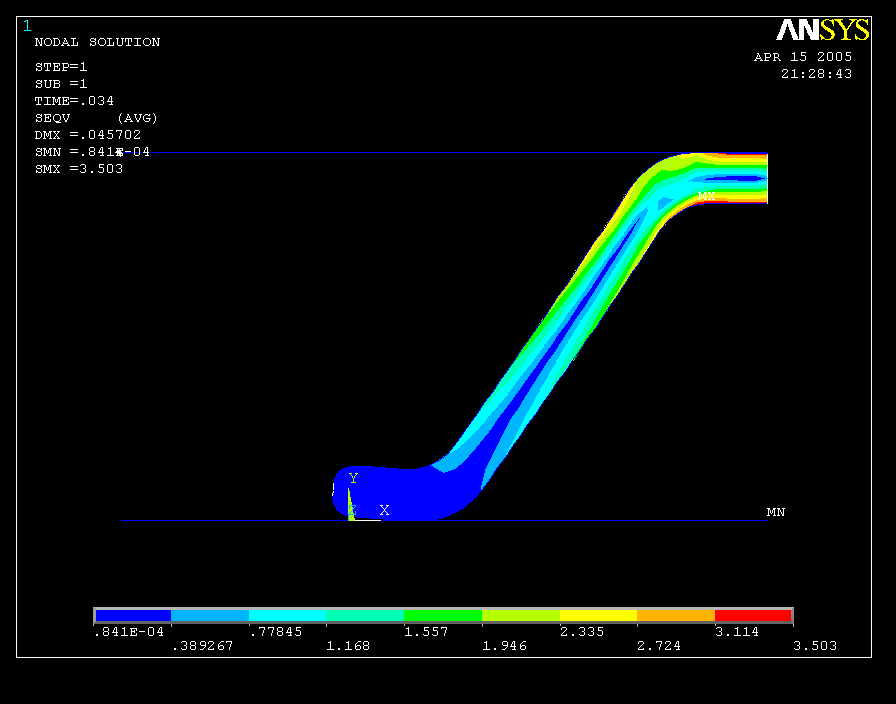
plnsol,s,eqv,0,1 ! Von Mises 应力云图
plnsol,cont,pres,0, ! 接触压力图
plnsol,epto,eqv ! 绘等效总应变图5-4
save,seal,db
定义反力变量、绘载荷变形图
Utility Menu > Plot > Elements
Main Menu > Time Hist Postpro > Define Variables
【Add】
・Reaction force
【OK】
拾取节点263(控制点)
【OK】
User-Specified Load = FORCE: FY
【OK】
【close】
或命令:
/POST 26
RFORCE,2,263,F,Y,FORCE
Main Menu > Time Hist Postpro > Graph Variables
・1st Variable to gragh = 2
【OK】
或命令: PLVAR, 2 (图5-4)
<1> 创建接触对1
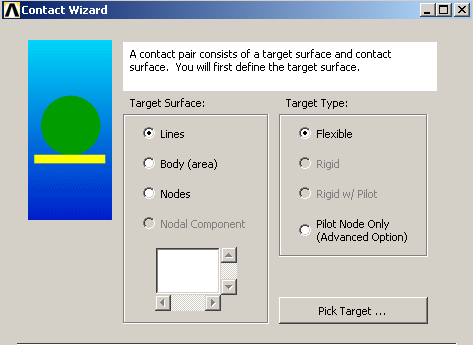
选线(1)( 接触对1的目标面)【OK】返回图5-5【next】
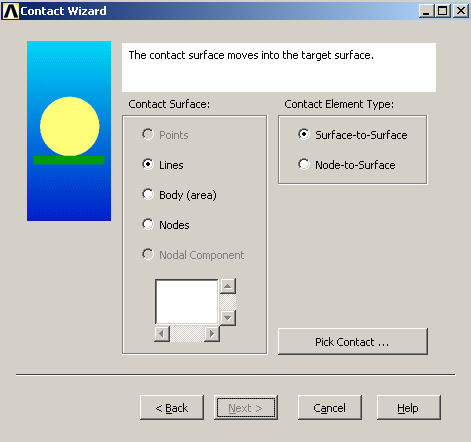
图5-6
选线(2) (接触对1的接触面)【OK】;返回图5-6【next】
3.设置接触参数
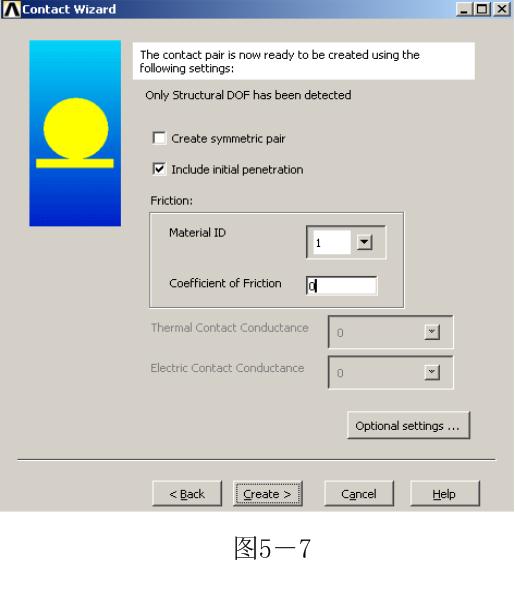
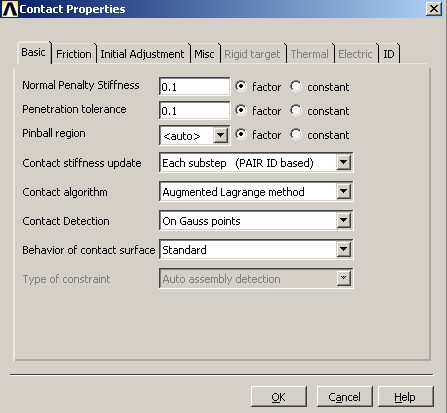
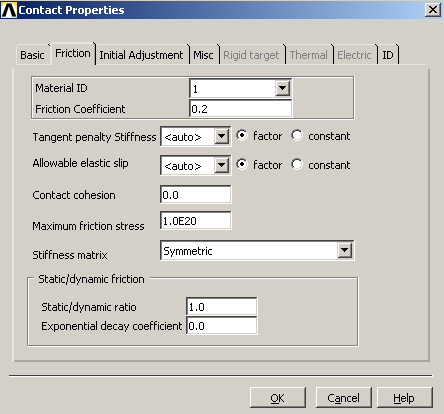
图5-8 图5-9
定义摩擦 (图5-9)
【OK】返回图 5-7 Coefficient friction 0.2 【Create】
5-11 图5-12
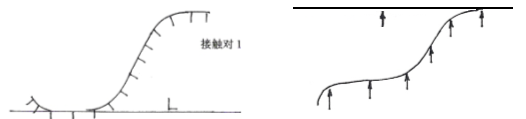
接触对 1 (图5-11)
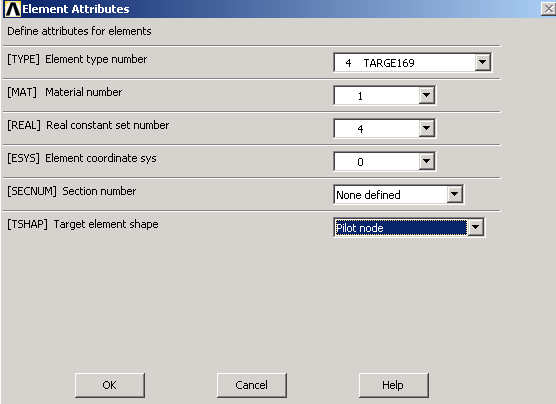
5.创建目标单元控制点
(1).设置单元属性 用命令流: Type,4 MAT,1 REAL,4 TSHAP,PIL10 GUI: Main Menu > Preprocessor > Modeling > Create > Element > Elem Attributes
(2).绘关键点
Utility Menu > Plot > Keypoints > Keypoints
(3).建立目标单元控制点
Main Menu > Preprocessor > Meshing > Mesh > Keypoints
选 K27 【OK】
或命令流:
KMESH,27
Step 6.施加位移约束
控制点 27 上施加 UY = -0.85
Main Menu > Solution > Define Loads > Apply > Structural >
Displacement > On Keypoints
选 K27 【OK】
Lab2 DOFs to be constrained: UY
Value: -0.5
【OK】
施加对称边界条件:
Main Menu > Solution > Define Loads > Apply > Structural > Displacement > Symmetry B.C. > On Lines
选线L4 【OK】
Step 7.求解控制、求解
Main Menu > Solution > Analysis Type > Sol′n Controls
Main Menu > Solution > Solve > LS_Current
Step 8.后处理
同1
无摩擦(MU = 0) Von Mises = 145.096
有摩擦(MU = 0.2) Von Mises = 142.038
接触刚度取 1.0 不收敛
0.1 收敛
/POST26
Main Menu > TimeHist Postpro
选控制点27, 绘图(见图5-4)。
6 面一面接触单元高级接触选项
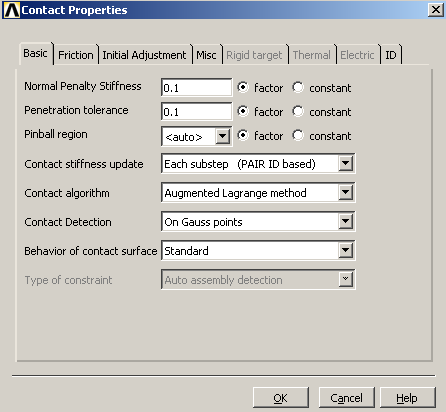
面一面接触具有 20 个可用实常数,2 个材料属性和 30 个可用单元选项设置。能够模拟特殊的效果和处理困难的收敛情况。 通常分析开始先用缺省值,只指定罚刚度和穿透容差及子步数。 只有在缺省设置遇到困难时才用高级选项。 所有的单元选项和参数都可以通过接触向导来控制;也可以通过实常数和单元选项来指定。 Conta178 接触单元、实常数选项见图 6-1 及 6-2。
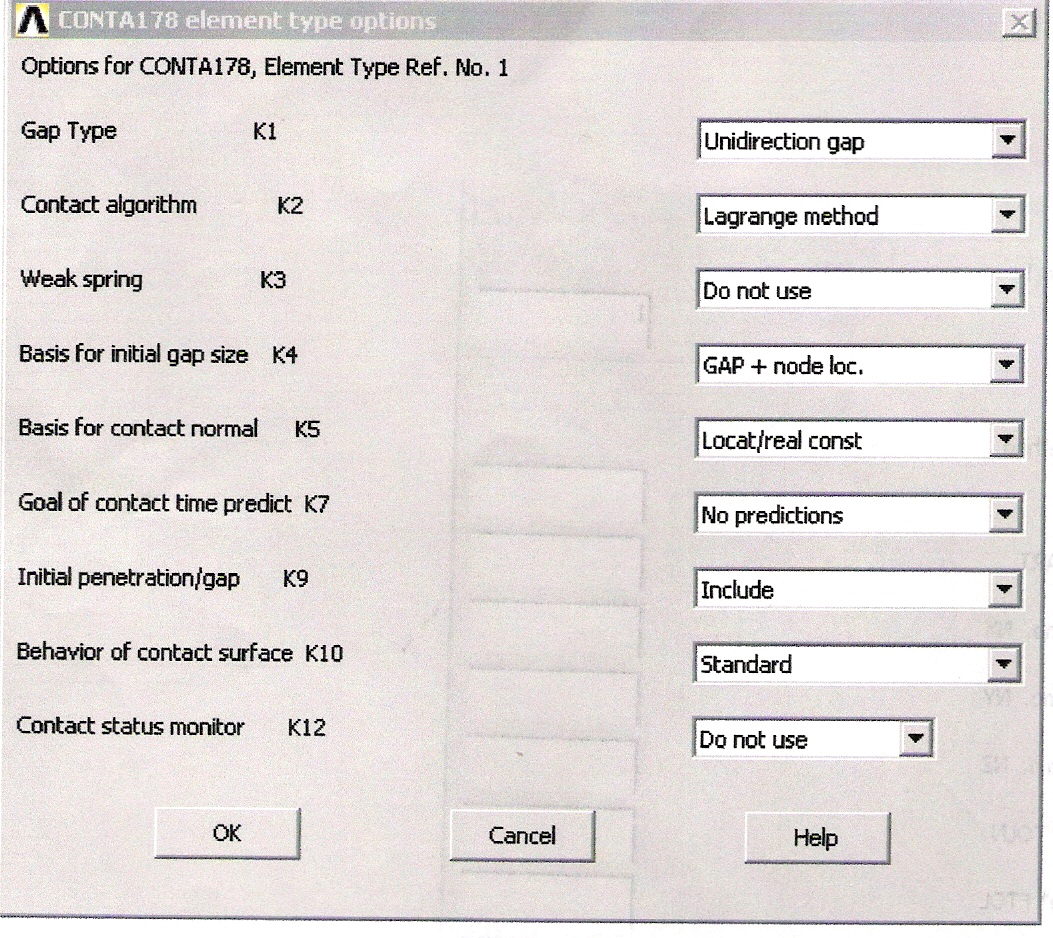

进入接触选项菜单用下列过程:
Main Menu > Preprocessor > Modeling > Create > Contact Pair
选 【property】
1、第 1 个重要选项:如何保证接触协调性:
使用修正的拉朗日法(缺省)
纯罚函数方法
在接触向导中 Basic Contact algorithm:
Augmented Lagrange Method
Penalty Method
对大多数模型,修正的拉格朗日方法能很好地工作。
罚函数法推荐用于具有变形很大的单元,很大的摩擦系数和/或用修正的拉格朗日方法时收敛性很差的情况。
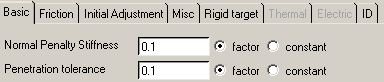
1、最重要的选项是法向罚刚度或接触刚度
对于大面积接触采用起始值(因子)1.0,对于柔性接触采用 0.1。
大值对应较高精度;小值对应较好的收敛性。
有时最好先以较小的接触刚度进行分析,然后在一系列载荷步中逐渐增大刚度-“渐变”的接触刚度,提高收敛性图6-2
在最后的载荷步逐渐提高到一个刚硬的值将提高计算精度。可通过向导的基本表或单元特性菜单设置以允许程序更新接触刚度
接触向导 Basic Normal Penalty Stiffness 1.0 ⊙factor ○constant
向导 Basic contact stiffness update: Each load step (PAIR ID based) none Each load step (允许用户指定刚度变化) Each substep (允许自动和用户指定变化)
2、第 2 个重要选项-穿透容差。
缺省情况下,穿透容差是一个因子乘以基体单元厚度。
对于变化很大的网格密度,采用因子会在接触表面的某些部分产生太小的容差,这时采用绝对值可能更好。
不要使用太小的容差,因为它总是对收敛性有害。
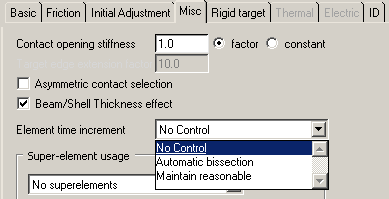
3、对于临界接触状态变化的自动时间步控制
1 不控制:不影响自动时间步,对静力问题自动时间步打开时此选项一般是足够的。 2 自动二分:如果接触状态变化明显,时间步长将二分。对于动力问题自动二分通常是足够的。 3 合理值:比自动细分更耗时的算法。 4 最小值:此选项为下一步预测最小时间增量(很耗计算时间,不推荐)
或在单元选项中控制:
Contact time/load prediction K7: No prediction
4、Pinball 区域影响接触状态的确定和其它许多接触特性
Pinball 区域是环绕接触单元的园(2D)或球(3D),描述接触单元周围 “远” 和 “近” 区域的边界 (图6-3)。
在缺省情况下,Pinball 区域半径是 4×基体单元厚度(刚-柔)或 2×基体单元厚度(柔一柔)
可以为 Pinball 半径指定一个不同的值。
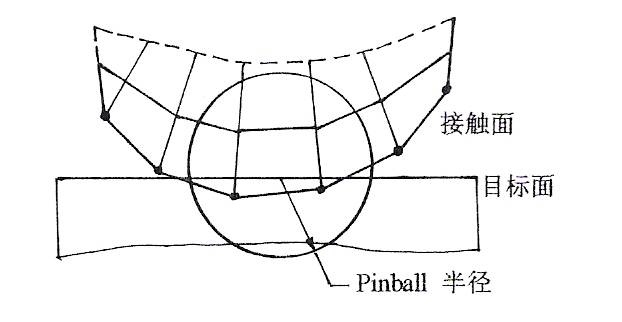

也可用实常数PINB调整球形区(对于初始值侵入大的问题是必要的)。
5、几种不同的接触模式 这些选项使你能够模拟特殊的物理现象。
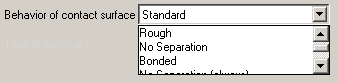
或单元选项: Behavior contact surface K12: standard
这些选项包括:
标准:正常的接触闭合和打开行为,具有正常的粘着/滑动摩擦行为。
粗糙:正常接触闭合和打开行为,但不发生滑动(类似于具有无限摩擦系数)
不分离(滑动):目标面和接触面一旦建立接触就不再分离(允许滑动)
绑定:目标面和接触面一旦接触就粘在一起
不分离(永远):初始位于 Pinball 区域内或已经接触的接触检查点在法向不分离(允许滑动)
绑定接触(永远):初始位于 Pinball 区域内或已经接触的接触检查点在剩余的分析过程中绑定在一起(Design Space 缺省值)
绑定接触(初始接触):只在初始接触的地方采用绑定,初始分开的地方保持分开。
计算实例:悬臂梁端部旋转(不分离行为)
6、影响某些表面行为的选项
Contact Opening stiffness(分开时的间隙刚度)保证不分离和绑定行为,它通过使用当存在间隙也具有非零刚度的弹簧来连接表面。
缺省情况下,此弹簧刚度等于法向罚刚度,其效果类似于法向罚刚度 - 刚度太小精度低;刚度太大会引起收敛问题。

摩擦系数影响基本摩擦行为:
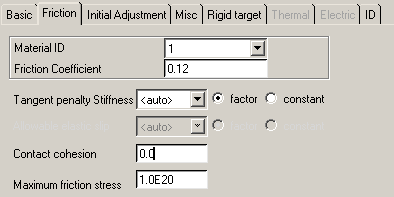
Contact cohesion 表示当没有法向压力时开始滑动的摩擦应力值。
摩擦导致非对称刚度阵。因为非对称矩阵很难计算(因此导致求解变慢),程序自动控制执行对称求解,利用此算法可以解决多数含摩擦接触问题。
有时,采用非对称矩阵能获用更好的收敛性。
如果遇到收敛缓慢问题可以用不对称求解选项。
记住:这种情况必须使用稀疏或波前求解器。
对于每个支持非对称矩阵的单元,此选项也可以由下列菜单激活:
Main Menu > Solution > Unabridged Menu >
Analysis Options
设置 Newton-Raphson 选项为 Full N_R unsymm
7、初始穿透
有几种技术可以模拟初始穿透接触问题(如过盈装配)。可以使用初始几何穿透,或指定偏移量,或二者皆有。(图6-5)
指定偏移量(CNOF)
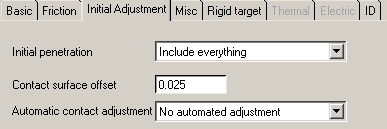
或在实常数中指定偏移量(CNOF)contact surface offset CNOF: 0.025
正的 CNOF 加大初始穿透 负的 CNOF 减小初始穿透或导致间隙 CNOF 可与几何穿透组合 自动 CNOF 调整 允许 ANSYS 基于初始穿透自动给定 CNOF 值。 导致 “刚好接触” 配置 ICONT 缺省为 0
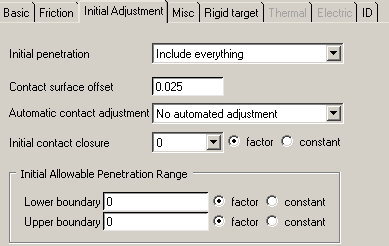
或单元选项: Auto CNOF/ICONT adjustment K5: No. Auto. Adjust
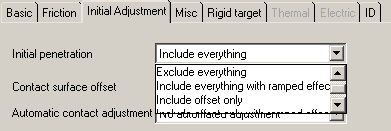
初始穿透选项包括:
Include everything:包括由几何模型和指定偏移量 (如果有的话)引起的初始穿透
Exclude everything:忽略所有初始穿透效应。
Include with ramped effects:渐变初始穿透,以提高收敛性。
Include offset only:只包括由偏移量指定的基本初始穿透。
Include offset only w/ramp:只包括由偏移量指定的基本初始穿透,且渐变初始穿透以提高收敛性
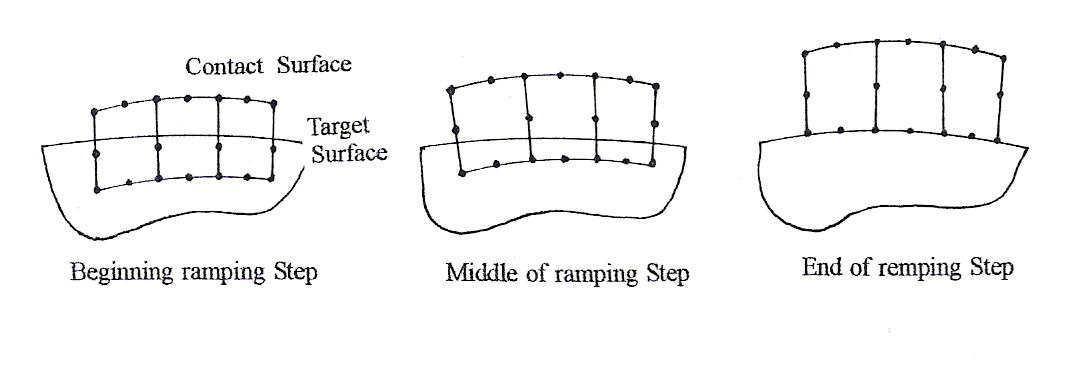
如果模型包含初始几何穿透,接触力将立即“阶跃”到一个大值。
-载荷突变经常导致收敛困难,期望有一种机制能够将初始穿透效应渐变到零。
Include with ramped effects 和 Include off set only w/ramp选项通过在第一载荷步,将初始穿透渐变为零克服收敛困难。为求得好的结果,在第一载荷步不应施加其它载荷 (图6-6)。
计算实例:初始穿透
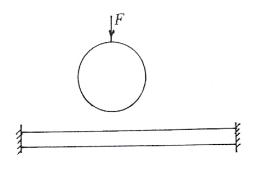
8、刚体模式
初始不接触的两个(或多个)物体的静力分析中,在接触建立前可能产生刚体运动 (图6-7)。
此例中圆柱体没有施加位移约束,面由力控制。
圆柱体的约束由圆柱体和平板之间的接触建立。
求解过程中两个物体分离,刚度矩阵奇异。
ANSYS 将产生一个负主元警告。有几个选项可以解决由于初始不相连物体引起的刚体模式:
三个高级接触特性允许调整初始接触条件以防止刚体模式:
(1).自动 CONF 调整
程序计算 CNOF 以清除间隙。
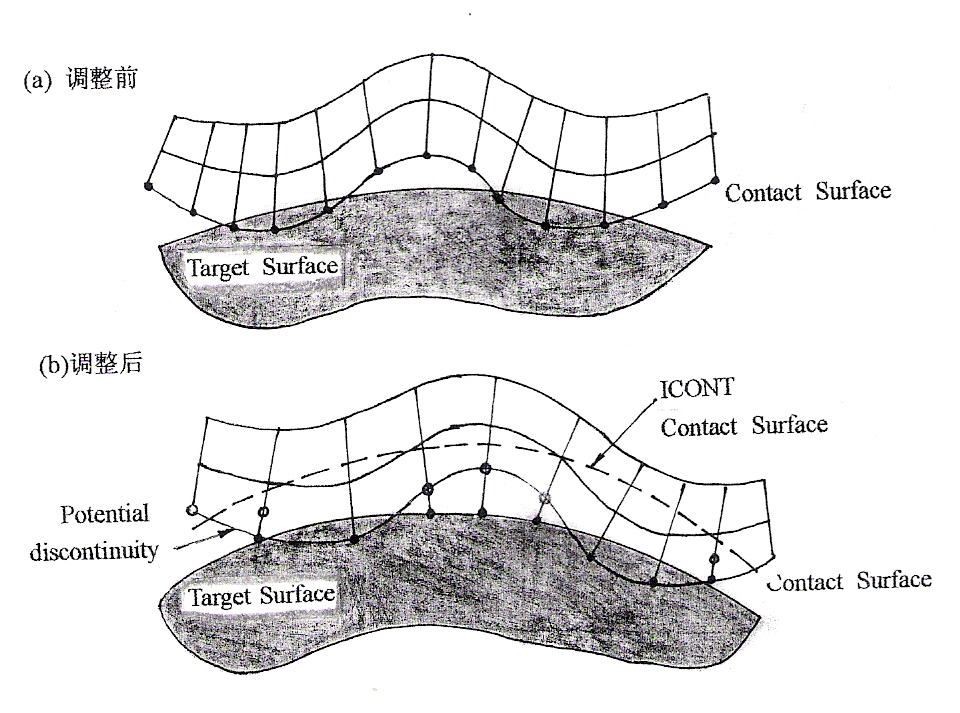
(2).初始接触环(ICONT)
将调整带内接触表面上的节点移到目标面上
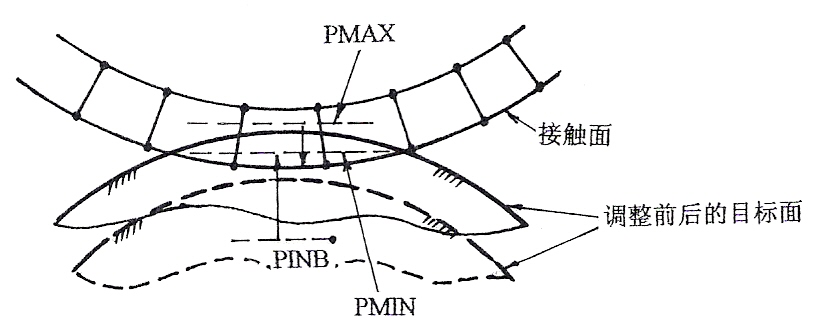
(3).初始允许穿透范围
(PMIN & PMAX):将刚体表面移动到接触面上
调整初始接触条件(ICONT)(图6-11):
实常数 ICONT 可用于指定目标面上的 “调整环”。位于调整环内的任何接触点都要移动到目标面上。推荐只进行很小的修正,如果 ICONT 值太大会产生不连续。如果未指定常数 ICONT,ANSYS 根据模型尺寸为 ICONT 提供一个小的缺省值。
关闭 ICONT,必须将其设置成非常小的值(如1e-20)
0 值代表非 0 的缺省值
计算实例:刚体-ICONT
如果目标面有 0 约束,采用 PMIN 和 PMAX 的初始调整将不被执行。
初始调整是一个迭代过程,ANSYS 最多使用 20 个迭代步把目标面调整到 PMIN 和 PMAX 范围内。
当目标面被移动,接触体之间不再存在间隙,而成为闭合接触的初始状态。
计算实例:刚体 PMIN & PMAX
未完,请看全面为您解说Ansys高级接触问题《三》
相关标签搜索:Ansys培训 Ansys有限元分析 机械设计分析培训 广州有限元培训 solidworks培训 CAD培训 ansys培训 solidworks proe培训 运动仿真 有限元FEA
客服在线请直接联系我们的客服,您也可以通过上面的方式进行在线报名,我们会及时给您回复电话,谢谢!

广州总部:广州市东风东路733号羊城同创汇编辑楼12楼
电话:020-83322285
137-1124-1980
培训QQ咨询:![]()
![]()
项目QQ咨询:
点击图标或添加QQ:503841570
E-mail:fea@020fea.com
广州详细交通线路 >>>东莞分公司: 东莞市莞城区莞太路34号创意产业园11号楼5楼
手机:133-3285-6491
培训QQ咨询:![]()
![]()
项目QQ咨询:
点击图标或添加QQ:503841570
E-mail:fea@020fea.com
东莞详细交通线路 >>>佛山分公司:佛山市禅城区季华一路28号智慧新城T15栋4楼401A
手机:133-3285-6491
培训QQ咨询:![]()
![]()
项目QQ咨询:
点击图标或添加QQ:2459395568
E-mail:fea@020fea.com
佛山详细交通线路 >>>
